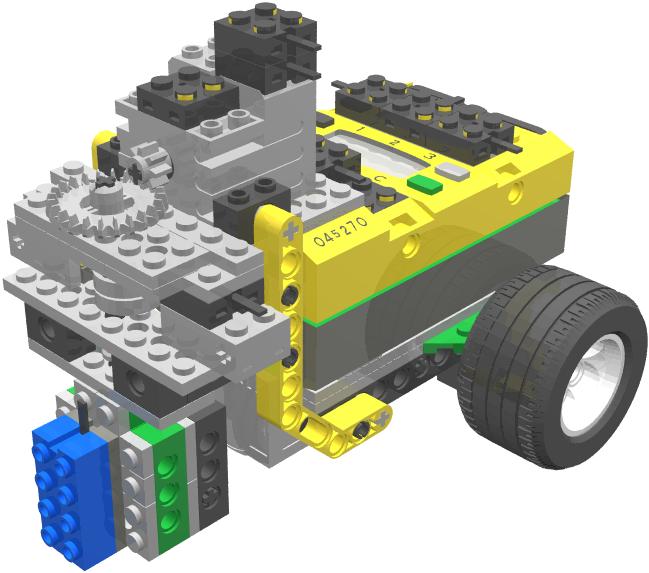
Completed Steer_One
[Previous Step]